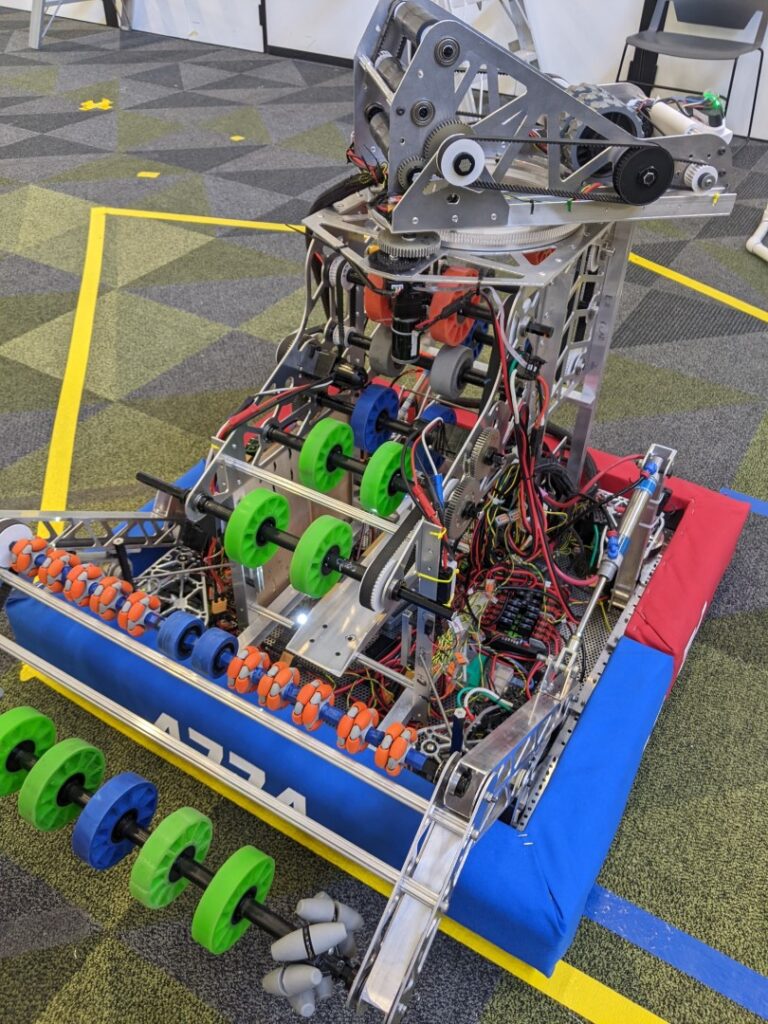
All prototypes have now been converted into the final mechanisms and fitted to the robot drive base.
The drivers had a chance to drive the robot with the software team tuning the code.
Further mechanical refinements are under way.
Intake
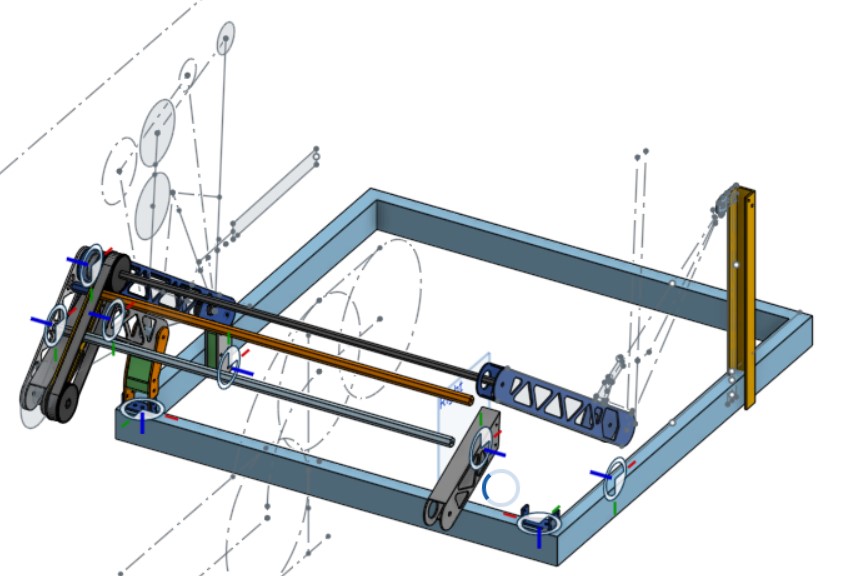
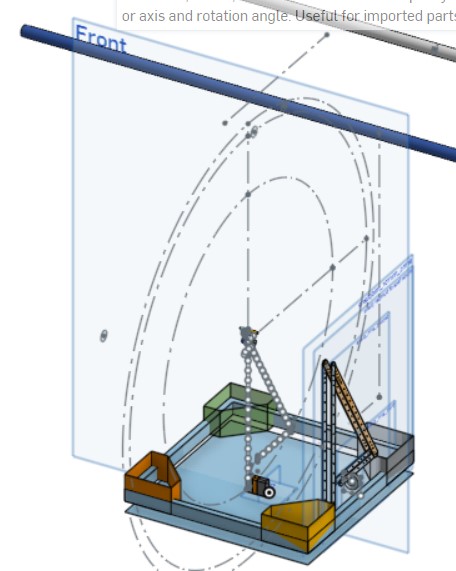
A motion study was done in Onshape to resolve the mounting of the pneumatic cylinders on the intake and the drive base.
The pistons were then fitted to the intake frame and a dedicated support system on the drive base.
Intake lifting motion study
Final intake mounted on robot
Indexer
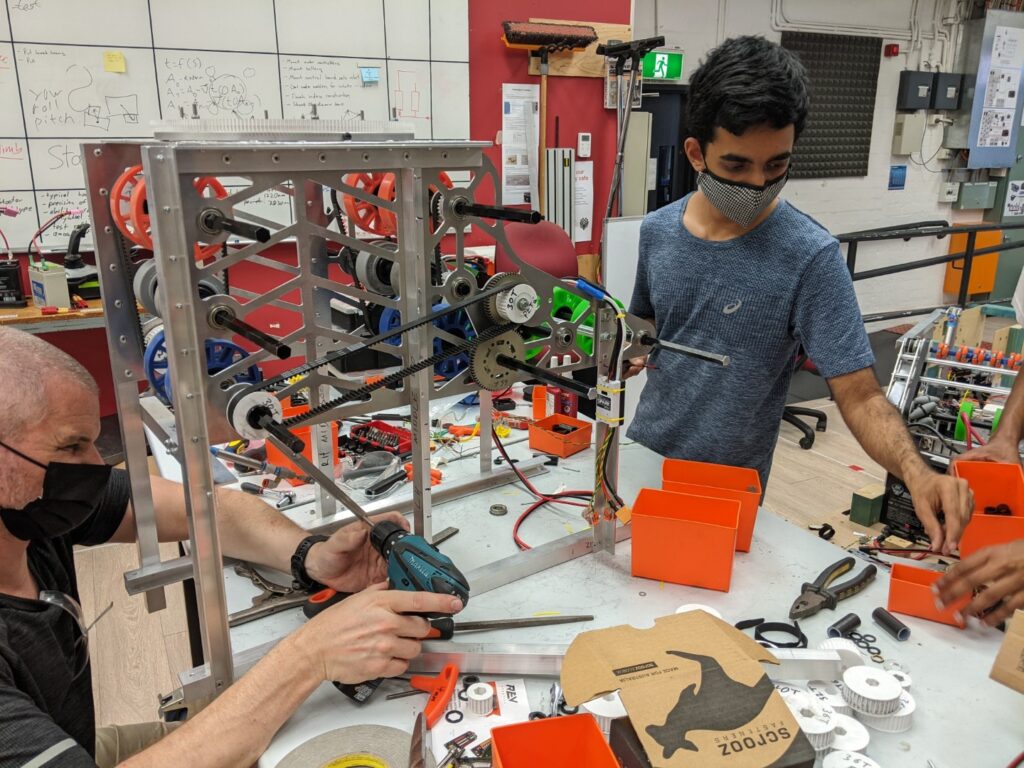
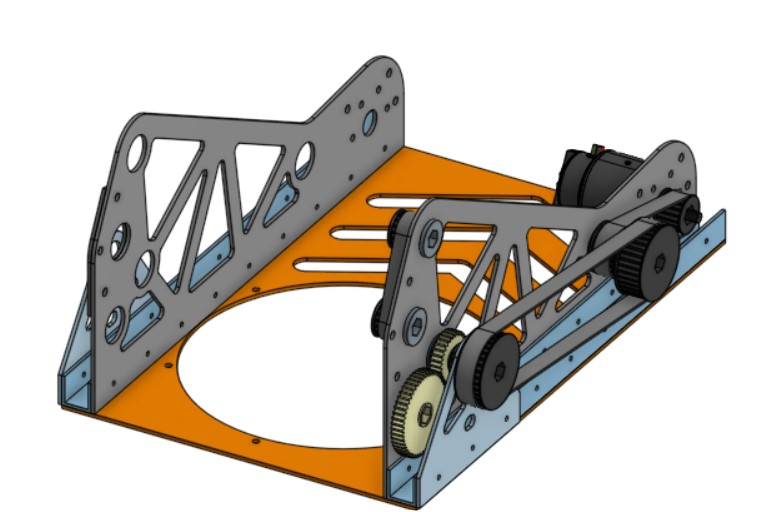
The indexer design is now finalised and the side plates have been cut on the CNC router.
Turret and shooter were fitted to the indexer and the whole assembly was then mounted on the robot drive base with all motors and controls connected to the control system.
Indexer Onshape side plate design
Indexer side panel CNC cut out
Indexer assembly
Shooter & Turret
The shooter is now fitted to the turret which will provide for a 380 degree rotation of the shooter.
This assembly is then mounted on top of the indexer.
Shooter - Onshape
Shooter and turret mounted on the indexer
Climb
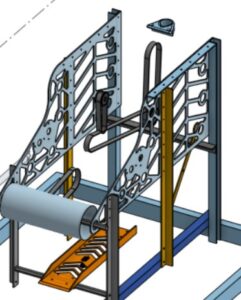
Work on the climbing mechanism commenced. This mechanism needs to engage with the Hub bars at the end of the game and lift the robot of the floor.
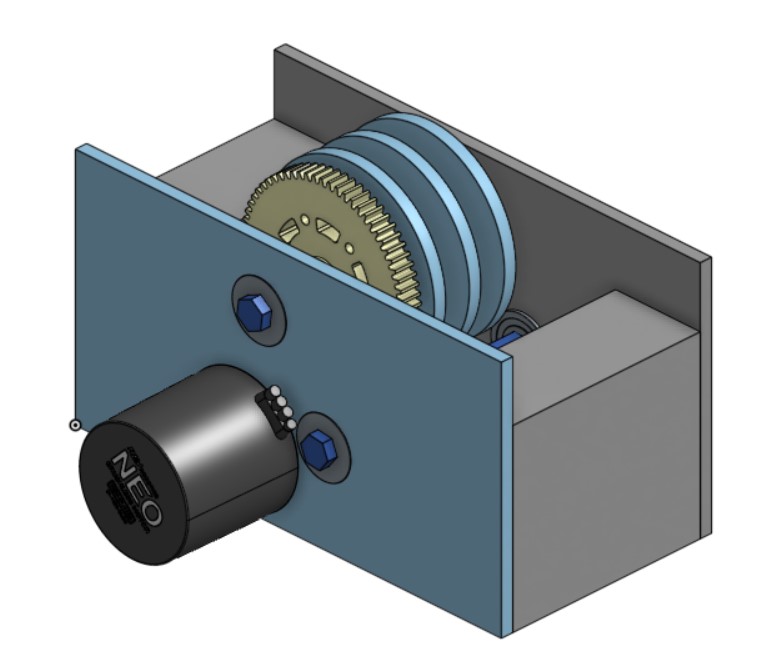
This will be achieved by having extendable arms that reach the hub bar and engage a hook which a rope. A winch on the robot will then lift wind up the rope so that the base of the robot is clear of the floor.
Climb - Onshape movement study
Climb Onshape winch design
Drive Base
The intake, indexer, shooter and climb mechanisms have been fitted to the drive base.
A functioning layout for the control and pneumatic system is still to be designed.
Robot Code
Additional robot code was written to improve the position locating of the robot and target identification.
Tests were carried out to ensure accuracy of the turret alignment with the goal.