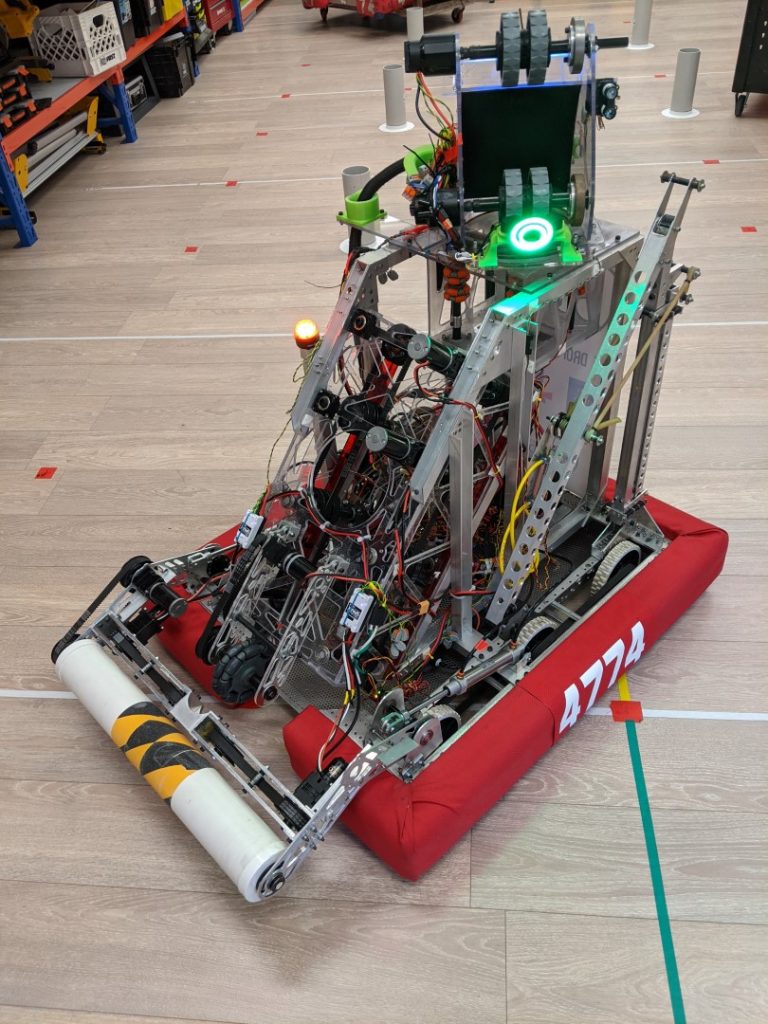
Our robot
FIRST INFINITE RECHARGE: Hungry Hippo
The extended season of 2020-2021 presented a wide variety of problems for us to solve. We were required to intake power cells and fire them into various different goals. Teams could also spin a colour wheel and climb a bar in the final 30 seconds to score additional points. This resulted in a complex, and robust robot which was designed with a strategy in mind.
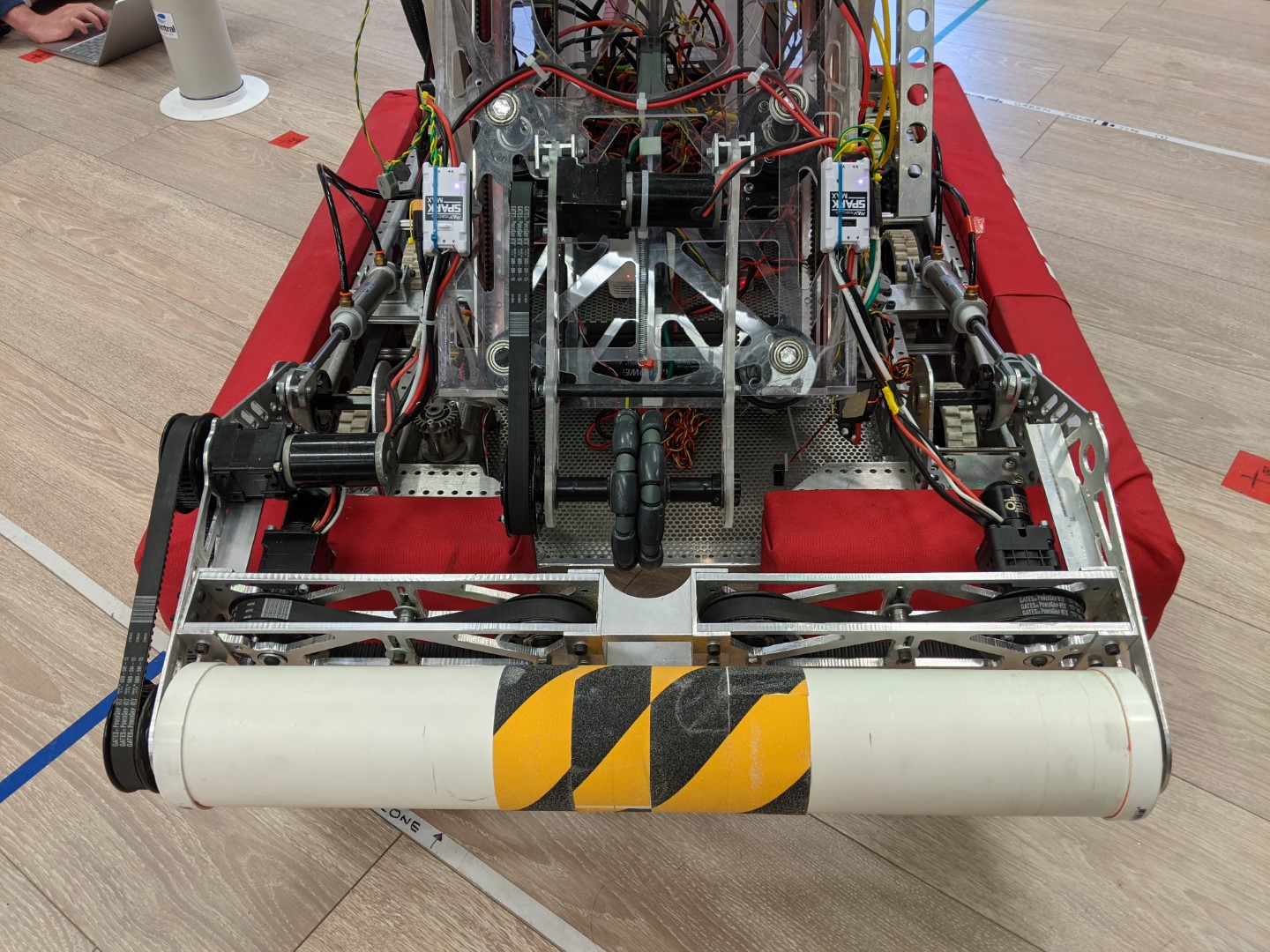
Our first step was to remove tasks which were not worth pursuing: the best approach was to do a few tasks efficiently and reliably, rather than do everything poorly. We decided to prioritse the collection and shooting of power cells and to climb in the endgame, the colour wheel was deemed to be an inefficient use of time. Our strategy required the ability to quickly cross the field to minimise cycle times, bars across the centre of the field made our swerve drives impractical so the descision was made to use a tank drivebase instead.